SP (Streaming Processor) : GPU 에서 연산을 하는 코어 유닛. 연산을 위한 레지스터, 실수연산용FPU (FP), 정수연산용 ALU (Int), 데이터 로드/스토어용 LSU (move, cmp) . CUDA에서 4개의 Thread를 동작
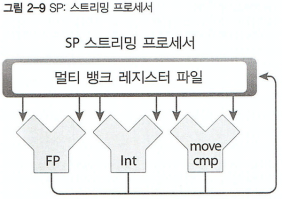
SFU (Special Function Unit) : Sin, Cos, 역수, 제곱근, Graphic Interpolation 등 특수연산
SM (Streaming Multiprocessor) : 8개 SP, 2개의 SFU, 공유메모리, 캐시로 구성. CUDA에서 워프와 블록을 실행
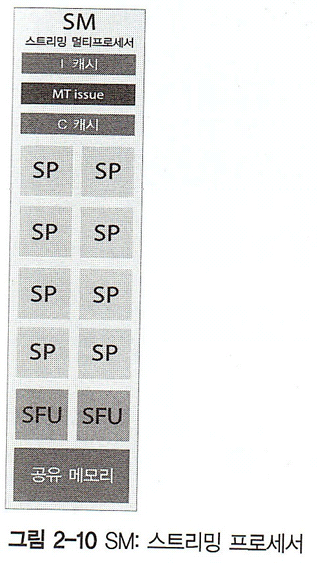
워프 : 하나의 SM에서 처리하는 스레드 ( 8(SP) x 4(Thread) = 32 Thread)
gridDim (x,y,z) : Kernel 함수를 호출할 때 정했던 Grid 차원
blockDim (x,y,z) : 블록의 각 차원에 대한 스레드 수
blockIdx (x,y,z) : 현재 블록의 Index
threadIdx (x,y,z) : 현재 Thread의 Index
아래 출처 : http://web.eecs.utk.edu/~mgates3/docs/cuda.html
CUDA syntax
Source code is in .cu files, which contain mixture of host (CPU) and device (GPU) code.
Declaring functions
__global__ | declares kernel, which is called on host and executed on device |
__device__ | declares device function, which is called and executed on device |
__host__ | declares host function, which is called and executed on host |
__noinline__ | to avoid inlining |
__forceinline__ | to force inlining |
Declaring variables
__device__ | declares device variable in global memory, accessible from all threads, with lifetime of application |
__constant__ | declares device variable in constant memory, accessible from all threads, with lifetime of application |
__shared__ | declares device varibale in block's shared memory, accessible from all threads within a block, with lifetime of block |
__restrict__ | standard C definition that pointers are not aliased |
Types
Most routines return an error code of type cudaError_t.
Vector types
char1, uchar1, short1, ushort1, int1, uint1, long1, ulong1, float1 char2, uchar2, short2, ushort2, int2, uint2, long2, ulong2, float2 char3, uchar3, short3, ushort3, int3, uint3, long3, ulong3, float3 char4, uchar4, short4, ushort4, int4, uint4, long4, ulong4, float4 longlong1, ulonglong1, double1 longlong2, ulonglong2, double2 dim3
Components are accessible as variable.x, variable.y, variable.z, variable.w.
Constructor is make_<type>( x, ... ), for example:
float2 xx = make_float2( 1., 2. );
dim3 can take 1, 2, or 3 argumetns:
dim3 blocks1D( 5 ); dim3 blocks2D( 5, 5 ); dim3 blocks3D( 5, 5, 5 );
Pre-defined variables
dim3 gridDim | dimensions of grid |
dim3 blockDim | dimensions of block |
uint3 blockIdx | block index within grid |
uint3 threadIdx | thread index within block |
int warpSize | number of threads in warp |
Kernel invocation
__global__ void kernel( ... ) { ... }
dim3 blocks( nx, ny, nz ); // cuda 1.x has 1D and 2D grids, cuda 2.x adds 3D grids
dim3 threadsPerBlock( mx, my, mz ); // cuda 1.x has 1D, 2D, and 3D blocks
kernel<<< blocks, threadsPerBlock >>>( ... );
Thread management
__threadfence_block(); | wait until memory accesses are visible to block |
__threadfence(); | wait until memory accesses are visible to block and device |
__threadfence_system(); | wait until memory accesses are visible to block and device and host (2.x) |
__syncthreads(); | wait until all threads reach sync |
Memory management
__device__ float* pointer; cudaMalloc( &pointer, size ); cudaFree( pointer ); // direction is one ofcudaMemcpyHostToDeviceorcudaMemcpyDeviceToHostcudaMemcpy( dst_pointer, src_pointer, size, direction ); __constant__ float dev_data[n]; float host_data[n]; cudaMemcpyToSymbol ( dev_data, host_data, sizeof(host_data) ); // dev_data = host_data cudaMemcpyFromSymbol( host_data, dev_data, sizeof(host_data) ); // host_data = dev_data
Also, malloc and free work inside a kernel (2.x), but memory allocated in a kernel must be deallocated in a kernel (not the host). It can be freed in a different kernel, though.
Atomic functions
old = atomicAdd ( &addr, value ); // old = *addr; *addr += value old = atomicSub ( &addr, value ); // old = *addr; *addr –= value old = atomicExch( &addr, value ); // old = *addr; *addr = value old = atomicMin ( &addr, value ); // old = *addr; *addr = min( old, value ) old = atomicMax ( &addr, value ); // old = *addr; *addr = max( old, value ) // increment up to value, then reset to 0 // decrement down to 0, then reset to value old = atomicInc ( &addr, value ); // old = *addr; *addr = ((old >= value) ? 0 : old+1 ) old = atomicDec ( &addr, value ); // old = *addr; *addr = ((old == 0) or (old > val) ? val : old–1 ) old = atomicAnd ( &addr, value ); // old = *addr; *addr &= value old = atomicOr ( &addr, value ); // old = *addr; *addr |= value old = atomicXor ( &addr, value ); // old = *addr; *addr ^= value // compare-and-store old = atomicCAS ( &addr, compare, value ); // old = *addr; *addr = ((old == compare) ? value : old)
Warp vote
int __all ( predicate );
int __any ( predicate );
int __ballot( predicate ); // nth thread sets nth bit to predicate
Timer
wall clock cycle counter
clock_t clock();
Texture
can also return float2 or float4, depending on texRef.
// integer index float tex1Dfetch( texRef, ix ); // float index float tex1D( texRef, x ); float tex2D( texRef, x, y ); float tex3D( texRef, x, y, z ); float tex1DLayered( texRef, x ); float tex2DLayered( texRef, x, y );
Low-level Driver API
#include <cuda.h> CUdevice dev; CUdevprop properties; char name[n]; int major, minor; size_t bytes; cuInit( 0 ); // takes flags for future use cuDeviceGetCount ( &cnt ); cuDeviceGet ( &dev, index ); cuDeviceGetName ( name, sizeof(name), dev ); cuDeviceComputeCapability( &major, &minor, dev ); cuDeviceTotalMem ( &bytes, dev ); cuDeviceGetProperties ( &properties, dev ); // max threads, etc.
cuBLAS
Matrices are column-major. Indices are 1-based; this affects result of i<t>amax and i<t>amin.
#include <cublas_v2.h> cublasHandle_t handle; cudaStream_t stream; cublasCreate( &handle ); cublasDestroy( handle ); cublasGetVersion( handle, &version ); cublasSetStream( handle, stream ); cublasGetStream( handle, &stream ); cublasSetPointerMode( handle, mode ); cublasGetPointerMode( handle, &mode ); // copy x => y cublasSetVector ( n, elemSize, x_src_host, incx, y_dst_dev, incy ); cublasGetVector ( n, elemSize, x_src_dev, incx, y_dst_host, incy ); cublasSetVectorAsync( n, elemSize, x_src_host, incx, y_dst_dev, incy, stream ); cublasGetVectorAsync( n, elemSize, x_src_dev, incx, y_dst_host, incy, stream ); // copy A => B cublasSetMatrix ( rows, cols, elemSize, A_src_host, lda, B_dst_dev, ldb ); cublasGetMatrix ( rows, cols, elemSize, A_src_dev, lda, B_dst_host, ldb ); cublasSetMatrixAsync( rows, cols, elemSize, A_src_host, lda, B_dst_dev, ldb, stream ); cublasGetMatrixAsync( rows, cols, elemSize, A_src_dev, lda, B_dst_host, ldb, stream );
Constants
| argument | constants | description (Fortran letter) |
|---|---|---|
trans | CUBLAS_OP_N | non-transposed ('N') |
CUBLAS_OP_T | transposed ('T') | |
CUBLAS_OP_C | conjugate transposed ('C') | |
uplo | CUBLAS_FILL_MODE_LOWER | lower part filled ('L') |
CUBLAS_FILL_MODE_UPPER | upper part filled ('U') | |
side | CUBLAS_SIDE_LEFT | matrix on left ('L') |
CUBLAS_SIDE_RIGHT | matrix on right ('R') | |
mode | CUBLAS_POINTER_MODE_HOST | alpha and beta scalars passed on host |
CUBLAS_POINTER_MODE_DEVICE | alpha and beta scalars passed on device |
BLAS functions have cublas prefix and first letter of usual BLAS function name is capitalized. Arguments are the same as standard BLAS, with these exceptions:
- All functions add handle as first argument.
- All functions return cublasStatus_t error code.
- Constants alpha and beta are passed by pointer. All other scalars (n, incx, etc.) are bassed by value.
- Functions that return a value, such as ddot, add result as last argument, and save value to result.
- Constants are given in table above, instead of using characters.
Examples:
cublasDdot ( handle, n, x, incx, y, incy, &result ); // result = ddot( n, x, incx, y, incy ); cublasDaxpy( handle, n, &alpha, x, incx, y, incy ); // daxpy( n, alpha, x, incx, y, incy );
Compiler
nvcc, often found in /usr/local/cuda/bin
Defines __CUDACC__
Flags common with cc
| Short flag | Long flag | Output or Description |
|---|---|---|
-c | --compile | .o object file |
-E | --preprocess | on standard output |
-M | --generate-dependencies | on standard output |
-o file | --output-file file | |
-I directory | --include-path directory | header search path |
-L directory | --library-path directory | library search path |
-l lib | --library lib | link with library |
-lib | | generate library |
-shared | | generate shared library |
-pg | --profile | for gprof |
-g level | --debug level | |
-G | --device-debug | |
-O level | --optimize level | |
| Undocumented (but in sample makefiles) | ||
-m64 | compile x86_64 host CPU code | |
Flags specific to nvcc
-v | list compilation commands as they are executed |
-dryrun | list compilation commands, without executing |
-keep | saves intermediate files (e.g., pre-processed) for debugging |
-clean | removes output files (with same exact compiler options) |
-arch=<compute_xy> | generate PTX for capability x.y |
-code=<sm_xy> | generate binary for capability x.y, by default same as -arch |
-gencode arch=...,code=... | same as -arch and -code, but may be repeated |
Argumenents for -arch and -code
It makes most sense (to me) to give -arch a virtual architecture and -code a real architecture, though both flags accept both virtual and real architectures (at times).
| Virtual architecture | Real architecture | Features | |
|---|---|---|---|
| Tesla | compute_10 | sm_10 | Basic features |
compute_11 | sm_11 | + atomic memory ops on global memory | |
compute_12 | sm_12 | + atomic memory ops on shared memory + vote instructions | |
compute_13 | sm_13 | + double precision | |
| Fermi | compute_20 | sm_20 | + Fermi [출처] [CUDA] 용어 정리|작성자 별빛 |
'Programming > 병렬처리(CUDA)' 카테고리의 다른 글
| CUDA driver version is insufficient for CUDA run time version (0) | 2017.04.05 |
|---|---|
| [CUDA] nVidia GPU의 CUDA 관련상세 Specification 정보 알아보기 (0) | 2016.10.26 |
| [CUDA] Visual Studio 2013에서 CUDA 개발 환경 구축 (0) | 2016.10.26 |
| [CUDA] CUDA C 프로그래밍 예제 (0) | 2016.10.26 |
| CUDA C 확장 키워드(CUDA C Extension) (0) | 2016.07.05 |

